< Back to Program

Keynote talks
Monday, 17 August 2026
100 seats available for the community. Coffee and food will be provided.
Info updated 17.06.2026
Time | Activity |
09:00 – 09:15 | Welcome with Henrik Gordon Petersen and Morten FAB |
09:15 – 09:45 | Keynote by INDRANIL SAHA (Indian Institute of Technology Kanpur) |
09:45 – 10:15 | Keynote by MIN YOUNG KIM (Kyungpook National University) |
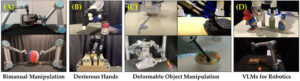
10:15 - 10:45 | Keynote by DANIEL SEITA (University of Southern California) |
10:45 - 11:15 | Coffee break |
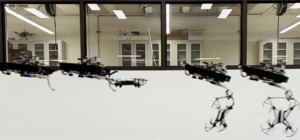
11:15 - 11:45 | Keynote by TONY G. CHEN (Georgia Institute of Technology) |
11:45 - 12:15 | Keynote by JEFFREY I LIPTON (Northeastern University) |
12:15 – 12:45 | Keynote by TBD |
12:45 - 13:45 | Lunch break |
13:45 – 14:15 | Keynote by TBD |
14:15 – 14:45 | Keynote by TBD |

INDRANIL SAHA - Indian Institute of Technology Kanpur
Professor, Department of Computer Science and Engineering Professor and
Head, Department of Intelligent Systems
Indian Institute of Technology Kanpur
Email: isaha@cse.iitk.ac.in
R&D Interests:
- Multi-robot systems
- Formal Methods for CPS and Robotics
- AI and Machine Learning for Robotics
Indian Institute of Technology Kanpur: cse.iitk.ac.in/users/isaha/
Linkedin profile: linkedin.com/in/indranil-saha-8859135/

MIN YOUNG KIM - Kyungpook National University
Professor, KNU
Email: minykim@knu.ac.kr
Kyungpook National University:
LinkedIn profile: linkedin.com/in/min-young-kim-735772b0/
Description of work:
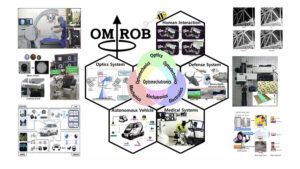
Min Young Kim is a researcher specializing in optomechatronics, intelligent systems, and multi-scale robotics. His work focuses on integrating optical technologies with robotics and mechatronic systems to create advanced sensing, perception, and control capabilities for next-generation robotic platforms.
His research can be summarized into four major themes:
1. Optomechatronic Systems and Technology Fusion
He develops integrated systems combining optics, mechanics, electronics, and embedded computing. His work emphasizes interdisciplinary “systemic fusion,” where optical sensing and mechatronic control operate together to enhance robotic intelligence and adaptability.
2. Advanced Vision and Imaging Systems
A major part of his research involves adaptive vision systems, infrared imaging, light-field imaging, and multimodal sensing. His projects include:
- Adaptive light-field vision systems for object detection and tracking
- EO/IR multimodal imaging for drone tracking in defense applications
- Adaptive image restoration for noisy infrared imaging systems
- Vision-based navigation systems for surgical robotics
3. Multi-Scale Robotics and Intelligent Perception
His laboratory investigates robotic systems operating across macro and micro scales, including:
- Biomedical and surgical robots
- Semiconductor inspection robots
- Autonomous aerial and ground robotic systems
- Micro-opto-mechanical systems (MOEMS)
4. AI-Based Computer Vision and Sensor Fusion
His recent publications demonstrate strong engagement with deep learning and AI-driven perception, including:
- Real-time semantic segmentation using feature pyramid networks
- Machine-learning-based human detection systems
- Multimodal sensor fusion architectures
- 3D reconstruction using laser and speckle imaging methods
His research contributions are characterized by:
- Integration of optical sensing with intelligent robotic control
- Real-time perception in challenging environments
- Multi-sensor fusion for autonomous systems
- Application-oriented engineering for defense, medical, and industrial robotics
He has also contributed patented technologies in optical measurement and interferometric inspection systems, including multiple U.S. patents.



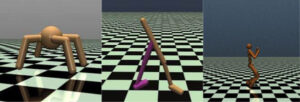
DANIEL SEITA - University of Southern California
Assistant Professor
Email: seita@usc.edu
Linkedin profile: linkedin.com/in/daniel-seita-51326288
Description of work:
Daniel Seita is an Assistant Professor in the Computer Science department at the University of Southern California and the director of the Sensing, Learning, and Understanding for Robotic Manipulation (SLURM) Lab. His research interests are in computer vision, machine learning, and foundation models for robot manipulation, focusing on broadening training data and improving performance in visually and geometrically challenging settings. The author’s work is supported by the University of Southern California, the National Science Foundation, Samsung Research America, and Honda Research America, as well as equipment and research gifts from Dexmate, NVIDIA, Google, and OpenAI.
Additional info: danielseita.github.io


TONY G. CHEN - Georgia Institute of Technology
Assistant Professor
Email: tonygchen@gatech.edu
Linkedin profile: linkedin.com/in/tonygchen/
Description of work:
Tony G. Chen is an Assistant Professor at the Georgia Institute of Technology, in the George W. Woodruff School of Mechanical Engineering. His research focuses on designing mechanical intelligent mechanisms for manipulation and locomotion, with application areas in bio-inspired robotics and field robotics. Mechanical intelligence allows us to develop mechanisms and robotic platforms that make challenges for perception, control, and autonomy easier or more robust for natural, unstructured, and often unpredictable environments by virtue of their physical designs.
Additional info: me.gatech.edu/user/1105


JEFFREY I LIPTON - Northeastern University
Assistant Professor
Email: j.lipton@northeastern.edu
Description of work:
Dr. Jeffrey Lipton Ph.D. is an assistant professor at Northeastern University in the Mechanical and Industrial Engineering Department. Jeffrey I. Lipton’s research in robotics centers on the development of mechanically intelligent robotic systems that achieve high performance through geometry, material structure, and embedded physical behavior rather than relying solely on conventional rigid mechanisms and software control. His work spans soft robotics, mechanical metamaterials, additive manufacturing, and precision motion systems, with major contributions including torque-transmitting soft robotic arms that spatially separate actuation mass from compliant end effectors, handed shearing auxetic (HSA) structures for grasping and force transmission, and flat-plane mechanisms that achieve precision planar motion through geometric self-reference. Across these projects, his research emphasizes robots that are safer, lighter, more manufacturable, and more adaptable by exploiting structural computation, distributed compliance, and architected materials. His past work on 3D printed foods and 3D printing for the hospitality industry has influenced two of the largest 3D printing companies in America and garnered media attention from the New York Times, BBC, and others. He was the lead developer for the Fab@Home project which supported life science and food science researchers’ 3D printing needs on all six habitable continents.
More info: coe.northeastern.edu/people/lipton-jeffrey